 Mellott's VR
Mellott's VRcoreMPU + Mbed Tracker
May 2014
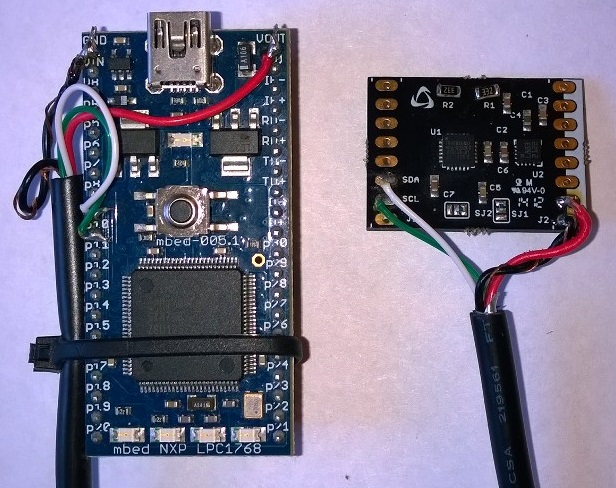
I’ve recently been using a NXP Mbed LPC1768 32-bit ARM Cortex-M3 proce microcontroller board along with a coreMPU sensor board from SolderCore. This platform is great for experimenting with all kinds of head tracking algorithms.
The mbed forums contains tons of free sensor code that can be mixed and matched to build a custom tracker. I’ve been using this platform to build a head tracker that has all the latest and greatest algorithms that I can switch between while its running. This allows me to compare and tweak each algorithm for comparison. It also allows me to learn the ins and outs of tracker firmware for my own education.
The coreMPU contains an Invensense MPU-6050 3-axis gyroscope with 3-axis accelerometer coupled with a Honeywell HMC5883L 3-axis magnetometer. Connecting it to the NXP LCP1768 Mbed board gives me a very powerful platform for development. Really you can connect any sensor board to the NXP and I intend on doing so. I started here with the coreMPU because it had the MPU-6050 sensor which I was interested in testing.
I’ll continue work with the Mbed LPC1768 board and update progress here as times goes on.
