
This is a super power glove hack. All files and instructions on how to do this power glove upgrade are included here.
This upgrade of an older nintendo power glove will produce a very nice Data glove comparable to those high priced gloves seen else where. I felt the need to post this for those of you who would like to do it yourself.
Materials needed for Glove Construction:
1. Nintendo Power Glove.
2. Copy of EagleCad board design,shematic,part list, & microcontroller source code.
3. Atmega163L surface mount microcontroller (I know, severe overkill. But it was available at the time and hey...we can expand).
4. ADXL202 Accelerometer. (surface mount version).
5. Max232 wide line driver.
6. 4Mhz low profile crystal.
7. DB9 hood, male & female socket, and mounting hardware.
8. Cable to be used for DB9 connection.
9. 9VDC wall jack & the cable to be used with it(cable coming out of DB9).
10. Handle full of passive components as seen in part list.
11. Pin headers, L.E.D.
12. Some zip ties, solder, iron, etc.
13. Download of NewGlove Demo Software.
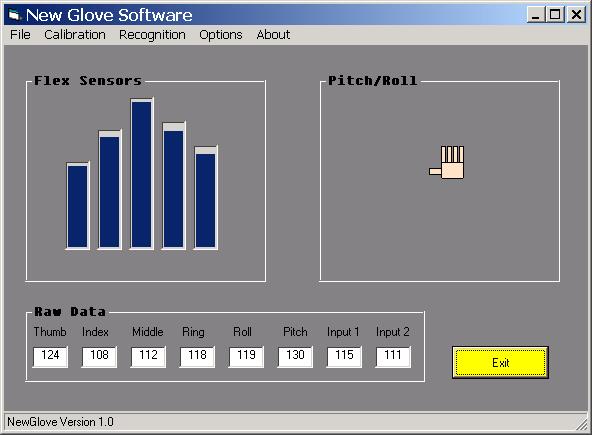
ĀTo put the operation of this glove in simple terms, its basically an A/D converter, an accelerometer, line driver, and flex sensors. It communicates to the PC via a DB9 serial port connection at a rate of 19200 baud, 8,N,1. It theorically provides 128 positions per finger. Although practically you get approx. 60 to 70 positions per finger (due to limitations of the human hand). The whole thing is powered via a 9VDC supply.
Here's the download Newglove.zip that contains all the board, schematic, and source code files. I'm not going to give a step by step on this project because if your capable of doing it then the schematics, board design, source code, and part list will be all that you need.
Here a picture of the demo NewGlove software that I wrote to test the operation of this glove. Eventually it will evolve to also include mouse and joystick drivers to be used with applications and games. I am also currently looking into implementing haptic feedback via small vibrating motors.
6/21/03: I've implemented a haptic feedback system on the NewGlove design. I've used the Port B pins on the Atmega163 to drive some switching transistors, which in turn drive small disc shaped vibrating motors. These are small vibrating motors which can be found in some pagers and cell phones.
I can individually controll each motor for each finger. This provides me with a very simple very nice haptic feedback option for the glove. Software can be written to pulse these ports to provide different levels of feedback to each finger ranging from 0 feedback to full force feedback.
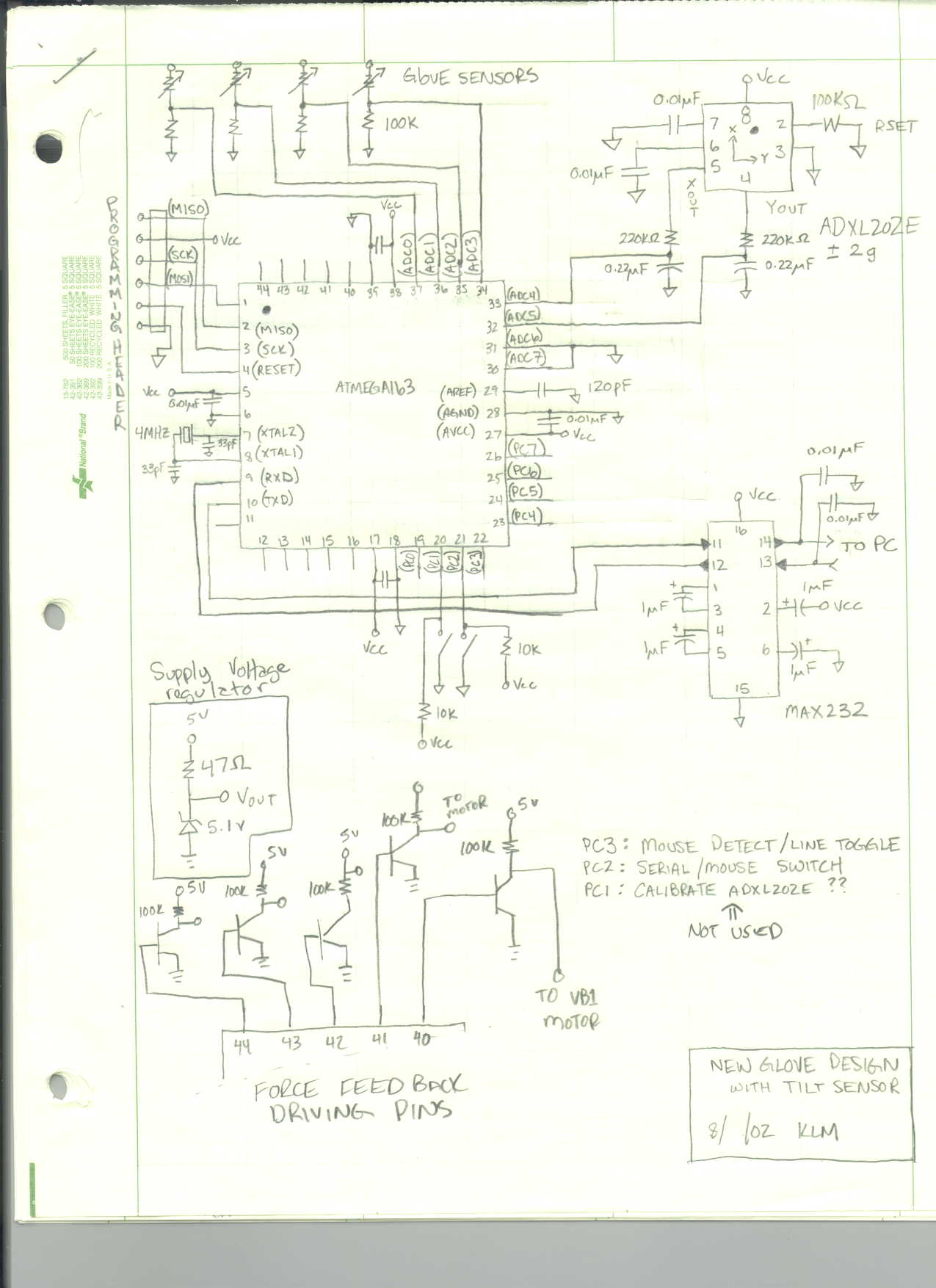
I've updated the NewGlove software to include functionality for this force feedback option. It provides basic ON/OFF control over each individual motor. The updated software also includes basic mouse emulation. The picture below is an updated schematic showing the forcefeedback drive circuitry along with the receiving line being hooked up to accept commands from the PC. The small vibrating pager motor can be found at Allelectronics. The part number is VB-1.
I seem to have lost the source code that included the haptic feedback for the small motors. All that is done is to send a character code from the software to the glove via the serial port. The microcontroller then turns ON or OFF the appropriate vibrating motor dependent on the character code received. Its a simple ON/OFF signal for each motor. You should be able to write this on your own with little trouble.
Here is a picture of the NewGlove with the haptic feedback attached.

The small jumper wire over the microcontroller is a connection to the ATmega163 receiver pin for its UART. In the orginal PCB files there in no path from the MAX232 receive line to the microcontroller. You will have to add this via a jumper wire. This is so the glove can receive the character codes to turn the individual motors ON and OFF.
Here's the source code for the ATmega163 (It does not include the haptic-feedback code).
This is a document for the NewGlove Stream Output information.(It does not include the haptic-feedback related info).
